UAV & MAV---are we alone?
-
This is Singapore's local produced MAV lah!STimes 2004-03-07.
2. ..see more Spore smart weapons!
3...u also cant miss this.
1.

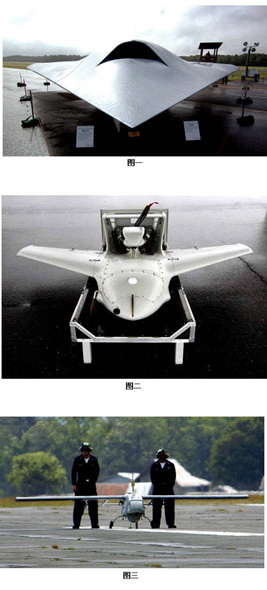
Top & middle:MAV ; Bottom:Fantail . All fr ST of SingaporeKnown also for its innovation solutions, including its fighter and helicopter upgrade solutions, ST AeroÂ’s Engineering & Development Centre pushes the limits of intelligent systems capabilities. Amidst our growing international footprint, ST Aero continues to harness the latest technology in R&D to develop innovative yet affordable Unmanned Aerial Vehicles (UAVs).
fr http://www.staero.aero/ems.html
2.Multirole Autonomous Vehicle---Really autonomous?
AWESOME ,TOP SECRET MUST SEE. MAV closer look.
Summary of MAV fr JDW 10.03.2004:Jane's Defence weekly. Available in public library:
Due for first flight after Asean Aerospace which held in Feb 2004.
---Subscale,all composite air-frame and twin-wheel tricycle landing gears.
( Poster's Note: In full scale production,it will be 4 to 5 times bigger.)
----powered to subsonic speed by a 0.4 kN (45 kg thrust) by a turbo fan and
SERRATED DORSAL intake(wat is it?)
---wt empty 60 kg plus 20 kg pay load.
http://www.staero.aero/images-gallery2/SkybladeII.jpg
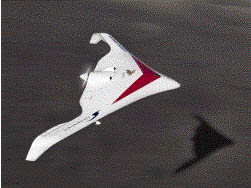
3. Skyblade 2
http://www.staero.aero/images-gallery2/STAeroFantail.jpg
4. FanTail in red shoes.
More info fr :Fantail brochure by ST Dynamic obtained 2 year? ago
-----Spec:
fuselage:9 cm in diameter,66 cm in length
over length 72 cm and width 84 cm,with landing gear extended
take off wt 2.3 kg,useful load 0.5 kg
max level speed more than 50 kts
hover endurance up to 1 hour(in 2005 increase to 2 hr)
Above spec for rotor diameter of 28 cm.Can be scaled up to carry more.
Payloads
--day light or low light video cam
--uncooled IR cam
--mircrophone
--comm relay equipment
--bio/chem sensors
--lethal or non lethal payloads
Ground station:
--note book,hand held,or wearable computer with flat screen display or helmet--mounted display
--real time image display
--map-based point-and-click mission planning
--High-level control control commands with in-flight reprogramming
Airframe
--carbon-fibre composite airframe
--modular construction
Mission
For close-range real-time rece in constrained environment.Possible missions:
Perimeter defence,Urban recce,Comm. relay for other UAVs
The brochure is,in fact, on line.Why u guy dunt tell me?
Sg is selling this .Any buyer?But no commission.
http://www.staero.aero/services-fantail.html
http://www.staero.aero/services-skybladeII.html fr Spore
5. OTHER UAV UNDER DEVELOPMENT fr same JDW
----SPARROW.Details unknown
----GOLDEN EAGLE,Miniature TV cam,gas analyser,microphone.fly at 500 ft
altitude,range/endurance 10 km/2 hours,controlled by note-book.
6. see more http://www.staero.aero/news_image_key.html
learn more
http://www.staero.aero/ems.html
SEE UNMANNED GROUND VENICLE,MAV AND FANTAIL
http://www.stengg.com/defence/transformation.aspx#precise
Dassualt Aviation's NEURON cost E 400m ,test flight 2010.below.

MAV first flight in 2004?
7.Looks like a brother--NASA X45A
http://www.nasa.gov/lb/centers/dryden/research/X45A/index.html
read Batman UAV
http://www.sgforums.com/?action=thread_display&thread_id=133961
8.Do other countries have similiar products?What are their spec?
Under development ?In operation?
Hey!Dunt just read! Share ur info.Ok?
Know more about NEURON?
http://www.dassault-aviation.com/gb/actualite/actualite/article.cfm?id=2108
http://en.wikipedia.org/wiki/Dassault_Neuron
NEURON shown in 2005 Paris air Show.Will Spore's MAV be so big?
fr http://jczs.sina.com.cn/2005-06-15/1205297342.html
fr http://jczs.sina.com.cn/2005-06-14/0921296884.html
Italy Sky-X UAV
http://www.uav.it/progetti/industrie/alenia/Sky-X.htm
http://www.defensetech.org/archives/001518.html
http://www.isrjournal.com/story.php?F=3114335
http://en.wikipedia.org/wiki/Finmeccanica_S.p.A.
see the photo of Sky--X UAV
fr
Dassault_Neuron
see PARIS AIR SHOW for source
http://i9.photobucket.com/albums/a90/puzzylion/fantail.bmp -
We are not alone...

-
-
U had a X45 link and picture from NASA in your original post and yet u are still asking if there is any other country with similiar stuff?
-
Besides US ,fern. Pl share here.
-
The UCAVs look like stuff we would have read about in 80s science fiction novels.They look like spacecrafts...
-
Excatly.I have two meanings for Unmanned.One is remote controlled.
The other is Autonomous.It will save training cost,human life and political cost.
I think the latter is we should aim to.
Of course,there are much potential for the former.
Proteus, A High-Altitude, Multi-Mission Aircraft by Scaled Composites LLC,USA
fr http://www.scaled.com/projects/proteus.htmlRESEARCHERS ENCOURAGED BY COLLISION-AVOIDANCE TEST RESULTS
April 8, 2003
Release: 03-21
Printer Friendly Version
Amphitech Radar on Proteus
NASA and industry researchers are increasingly confident a pilot in a remote ground station can safely detect and avoid collisions between an Unmanned Aerial Vehicle (UAV) and other aircraft in the skies. Detect, See and Avoid (DSA) technology is vital if remotely piloted or autonomous aircraft are to be integrated into the airspace system shared with inhabited aircraft.
The latest round of flight tests, sponsored by NASA Dryden Flight Research Center under the Environmental Research Aircraft and Sensor Technology (ERAST) program, took place April 1-4 near Mojave, Calif.
“The goal of the test was to be able to make a decision based on radar data in enough lead time to maneuver the test aircraft to avoid a close encounter with the intruder aircraft,” said Glenn Hamilton, UAV subsystems project manager at NASA Dryden.
Proteus in flight over Southern California
Scaled CompositesÂ’ Proteus aircraft, with safety pilots on board but controlled from the ground like a true UAV, was repeatedly directed away from conflicting flight paths with a variety of aircraft, some of which did not emit any signals to show their positions in the sky. Central to this round of tests was the Amphitech OASys radar system mounted on the chin of the Proteus.
In all 20 scenarios flown, ProteusÂ’ ground operator was able to detect the presence of other aircraft that posed the potential for collisions, maneuvering the test aircraft to keep the intruding aircraft outside an imaginary 500-ft. bubble of safe airspace surrounding Proteus. The conflicting aircraft ranged greatly in speed, from a NASA F/A-18 high-speed jet to several types of general aviation aircraft and an unpowered sailplane. A hot-air balloon had been on the roster, but winds at Mojave precluded its use in this round of tests. -
Killer Bee UAV featured in the March 7th issue of "Aviation Week."The KillerBee features an ultra-efficient blended-wing configuration. The blended-wing merges the body and wing to reduce weight and drag. The shape also lends itself to simplified manufacture. The production KillerBee will have only 3 airframe parts. All systems are accessible from a single panel. This patented Swift concept will reduce manufacturing costs to a minimum.
fr http://www.swiftengineering.com/05Aerospace/KillerBee/KillerBee.htm
Another advantage of blending the body and wing is stiffness. Most of the wing is quite thick. This allows the KillerBee to fly at speeds far greater than its cruise speed. Why is this advantageous? This allows the KillerBee to be released from fast-flying aircraft. Other small aircraft need to be folded to avoid the stresses of high speed flight. The KillerBee doesnÂ’t need the expensive folding mechanism.
wait longer ,watch the motion picture -

pdoto taken fr Dragon Eye,UAV fr US Marines.May be in Iraq.
fr http://jczs.sina.com.cn/2005-03-20/1059274344.html
2.US using more than 700 UAV in Iraq.
http://jczs.sina.com.cn/2005-04-07/0739279065.html
get translation fr
http://babelfish.altavista.digital.com/
choose Chinese--simpl to English. -
Image fr ST Engineering AA 2004
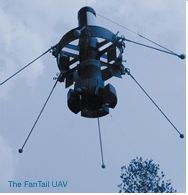
Fantail
2.MAV see my first post.
Another product that attracted much attention at the air show was the
Fantail, a mini-unmanned aerial vehicle (UAV) ideal for use in urban missions.
It can hover over an area to give a 'god's-eye' perspective to infantrymen
in a variety of battlefield scenarios.
Equipped with a day, low-light or night camera, the Fantail provides
over-the-hill, around-the-corner and over-the-next-building surveillance and
reconnaissance. When fitted with chemical sensors, it can detect a chemical
attack and track the source.
And it is not just for war fighting. The mini-UAV has law enforcement and
civil defence applications as well. For example, it can observe a forest fire
from positions that would be too risky for humans.
Fantail Unmanned Aerial Vehicle: Suited for both urban and military use. Has
vertical take-off and landing capability. Provides over-the-hill,
around-the-corner and over-the-next-building perspective. Civilian functions
include inspection of industrial facilities, commercial aerial survey and
reconnaissance for law enforcement and civil defence forces.
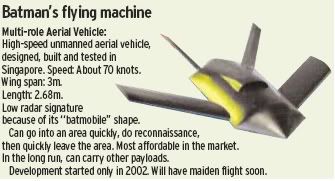
STimes 07.03.2004Multi-role Aerial Vehicle: High-speed unmanned aerial vehicle, designed, built and tested in Singapore. Speed: About 70 knots.
Pl note this is a down scale prototype.According to JDW,the full scale may be 4 to 5 times bigger..
Wing span: 3m.
Length: 2.68m.
Low radar signature because of its batmobile' shape.
Can go into an area quickly, do reconnaissance, then quickly leave the area.
Most affordable in the market.
In the long run, can carry other payloads.
Development started only in 2002. Will have maiden flight soon. -
UMV in the air are very common.But not surface and land.
US Army will be conducting a race for UMV Land and the prize is US$2M!!
ST Engineering's capabilities in unmanned platforms offer tremendous potential in both military and homeland security applications. Its Improved Remote Attack Vehicle is a remotely controlled, multi purpose Soldier-class Unmanned Ground Vehicle with a tracked-based robotic system that seeks to reduce human risk for operations at the battlefront. It has also developed a Robotic Light Strike Vehicle that can be fitted with long range sensors and cameras for deployment right in the midst of high tension situations, without subjecting any human agents to undue risks.
fr http://www.stengg.com/defence/transformation.aspx#precise -

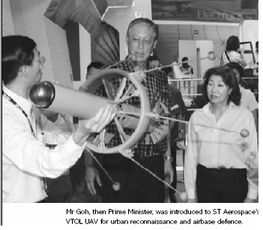
fr http://stengg.wizwerx.com/postevent/pages/products.aspA mini Vertical Take-off and Landing (VTOL) UAV, ST Aero's FanTail is a compact and lightweight system ideally suitable for urban reconnaissance and airbase defence.
-
Defence engineers began developing the autonomous unmanned ground vehicle in 1996 and came up with a prototype in 2000, said Ms Tey Hwee Choo, a programme manager with the Defence Science and Technology Agency, which is spearheading the project.
fr http://www.dsta.gov.sg/home/DisplayPage/ContentPage10.asp?id=2506
The new machine could be equipped to do the same job as the SAF's Bionix infantry fighting vehicle and Bronco multi-purpose tracked vehicle.
On top of that, it can be sent to spy on the enemy and clear mine fields.
The engineers are also working on a system that will allow a single operator to control a number of these robots from a distance.
Such a system will be able to screen information culled from the battlefield and pinpoint what is vital to commanders.
Similar research is also being done by the defence industry here.
Local aircraft maintenance specialist Singapore Technologies (ST) Aerospace began work last year on a second version of an unmanned aerial vehicle, the Skyblade, which was developed initially by DSO National Laboratories, Singapore's largest defence research and development organisation.
The machine is a mini aircraft with a 1.7m wingspan and a maximum take-off weight of 5kg. It is controlled by radio waves up to a range of 8km.
An ST Aerospace spokesman said its electric motor can stay undetected even if it is as close as 25m.
It is launched by hand and recovered by parachute, eliminating the need for a runway.
Local weapons maker ST Kinetics is also working on an unmanned version of the Spider Light Strike Vehicle, developing the components to enable the four-wheel drive vehicle to operate in a semi-autonomous mode.
The unmanned version, which can travel at up to 60kmh, steered by an operator up to 1km away, is one of about half a dozen unmanned vehicles the company has developed in the past two years.
In about four years' time, it aims to start selling its machines to military and commercial users, possibly equipped with cameras, computers and communication devices more powerful, yet smaller and more rugged than ever before.
These research efforts dovetail with the SAF's vision of transforming itself into a 'third generation' fighting force, exploiting technology to add items such as battle drones to its arsenal.
An associate professor at the Institute of Defence and Strategic Studies, Dr Bernard Loo, believes unmanned vehicles will be most effective in urban warfare, to detect enemies in buildings.
'It means where you used to need a company of soldiers, you might require less. So you could reduce your own casualties,' he said.
Other unmanned projects
Air
- Among the unmanned aerial vehicles being developed is Singapore Technologies Aerospace's bat-like MAV-1, or multi-role autonomous vehicle, which can fly into an area, reconnoitre the place, then leave.
It also has the Skyblade II and the cylindrically shaped Fantail, which can take off and land vertically, fly horizontally and hover.
- Defence engineers have also been working on the Lalee, or low altitude long-enduring endurance, a large aircraft that can fly unmanned or be piloted manually.
It is designed to fly at around 18,000m, above the airways and below satellite surveillance systems, possibly serving as an integrated airborne surveillance and communications system, to provide continuous coverage over a large area.
Sea
- DSO National Laboratories is testing a 2m-long underwater robot called SEA-i designed to detect underwater mines. The machine, which was developed over the past 2 1/2 years, runs on batteries, can travel at 6 knots and dive 100m.
- The Republic of Singapore Navy has been developing an unmanned surface vessel, the Spartan, with the United States Navy since 2002. The speedboat allows warships to inspect suspicious vessels without the need for sailors to board them.
2.What did they achieve since 2000? -
The XUV routinely adjusted its course to successfully negotiate these obstacles with little supervision from the soldiers. The DEMO III program continued to refine its capabilities to detect and maneuver around obstacles while increasing speed in FY01. The program conducted a military exercise at Indiantown Gap, PA in October 2001 using four XUV's. Starting in FY 01, the JRP will combine its funding of DEMO III with funding from the Army. The Army Research Laboratory will continue to manage the program from Aberdeen Proving Ground, MD

fr http://www.globalsecurity.org/military/systems/ground/xuv.htm
2.AUGS in SporeLianhe Zaobao, Page 3 - Saturday, March 5, 2005
see image http://www.dsta.gov.sg/Home/DisplayPage/ContentPage12.asp?id=2539
The Defence Science & Technology Agency (DSTA) spearheaded the development of the Autonomous Unmanned Ground Systems (AUGS) to replace soldiers in dangerous tasks such as surveillance and mine clearing.
The system is centered on an Autonomous Unmanned Ground Vehicle (AUGV) which is commanded and controlled from another vehicle.It can be operated in the following modes:
- Tele-operated: full control by operator
- Semi-autonomous: partial control by operator with limited sensor capability
- Autonomous: minimum or no supervision by operator to perform autonomous navigation and movement over long distances.
The vehicle is equipped with advanced technologies such as stereo vision, obstacle detection, path planning, Global Positioning System (GPS), Inertial Navigation System (INS) and Man machine interface.
The AUGV is also able to carry out the various functions of a manned platform such as BIONIX or BRONCO.
We are not so far behind in RD of Autonomous Unmanned platforms,if not on par!
AUGV by DSTA of Spore -
UAV save money and LIVE!!
The launch of small and very accurate missiles from UAVs can disable the sensors of enemy warships before finally killing them with air launched Guided-Munitions or Anti-Ship Missiles. The main attraction of using UAVs in warfare is the elimination of the most valuable and vulnerable component in the air platforms, the pilots. The Life-Cycle-Cost (LCC) to achieve the same mission using UAV will be less than 10% of the LCC of current generation of manned aircraft. This relatively low cost to further exploit the air dimension for Naval warfare with UAVs must be very tempting to all Navies.
fr NAVAL PLATFORM TECHNOLOGY SEMINAR 2001(Version 6.0)
Text of Address by Prof Lui Pao Chuen, Chief Defence Scientist,Spore
Naval Platform Technology Seminar 10th May 2001
fr http://www.mindef.gov.sg/nps/technical/paper1.html
2.There are too much incentives to RD UAV!!
3.Some abstracts of research paper for UAV nuts
http://www.siae.org.sg/ncatmc/abstracts/uav.htm
4.US$2 million race by DARPAThe Next Grand Challenge
fr http://www.darpa.mil/grandchallenge/overview.html
The 2005 DARPA Grand Challenge will be held on October 8, 2005 in the desert Southwest. The team that develops an autonomous ground vehicle that finishes the designated route most quickly within 10 hours will receive $2 million. The route will be no more than 175 miles over desert terrain featuring natural and man-made obstacles.
DARPA has to outsource the technology of autonomous unmanned ground venicle,even with so much fund and researchers !!
5.FCS UGCV-PerceptOR Integration (UPI)
http://www.darpa.mil/tto/programs/fcs_ugcv.html -
July 5, 2005
fr http://www.insitugroup.com/pages/News/announcements.html
ScanEagle Demonstrates Real Time Java Piloting and Wins Duke's Choice Award
The ScanEagle recently demonstrated the feasibility of using real time Java to pilot a reconnaissance drone and carry out complex decision-making processes in battlefield scenarios. While most drones require human intervention either in piloting or flight planning, the ScanEagle's avionics payload can monitor battlefield conditions and automatically update its flight plan using that data - all in real time. These capabilities won ScanEagle the Duke's Choice Award for Emerging Technology at the JavaOne Worldwide Developer Conference, the world's largest Java technology event. The Duke's Choice Awards recognize extreme innovation in the world of Java technology. "The idea behind the awards is simple -- we want to recognize the 'best of the best'" said Sun CEO Scott McNealy.
Photographs
2.a UK co.in UAV http://www.shephard.co.uk/
3.Another concept worths to take a lookImagine a large group of small unmanned autonomous aerial vehicles that can fly with the agility of a flock of starlings in a city square at dusk. Imagine linking their onboard computers together across a short-range, high-bandwidth wireless network and configuring them to form an enormous distributed parallel computer. Imagine using this huge computational resource to process the sensory data gathered by the swarm, and to direct its collective actions. You have now grasped the idea of a flying gridswarm. Here at Essex, we are working to bring this vision to reality.
fr http://gridswarms.essex.ac.uk/index.html .This site seems deserted.
Interesting factoid: a typical flock of starlings (about 2,000 birds) contains as much brain tissue as a single human.
Is it Essex U?
4.some papers on flocking of UAV,eg
http://www.eng.man.ac.uk/Aero/wjc/papers/Flocking_Bristol_2002.doc
fr http://gridswarms.essex.ac.uk/links.html, few papers ,old info,come fr famous U!! -
Multifunction Utility/Logistics and Equipment (MULE)
and Armed Robotic Vehicle – Assault Light (ARV-A(L))DALLAS, TX. - (June 22, 2005) - Lockheed Martin [NYSE: LMT] has received a $61 million plus-up to the Multifunction Utility/Logistics and Equipment (MULE) System Developme nt and Demonstration (SDD) contract as a result of the recent Future Combat System (FCS) restructure . The contract modification was issued by the FCS Lead System Integrator (LSI), The Boeing Company.
fr http://www.missilesandfirecontrol.com/our_news/pressreleases/05pressrelease/062205_MULE.htm
This modification increases the number of prototypes being delivered from 17 to 19, with the first prototypes delivered in the third quarter of 2010. Deliveries will consist of Transport, Armed Robotic Vehicle – Assault Light (ARV-A(L)) and Countermine variants, with final deliveries in spring 2011.
.............
The MULE/ARV-A(L), a 2.5-ton class vehicle for the FCS, offers an extraordinary capability that will support the U.S. Army's transformation to a lighter and more mobile fighting force. The vehicle's unique mobility will enable it to go everywhere the soldier can go and more. It will allow soldiers of the transformed Army to use technology to do the dull, dirty and dangerous jobs of the current forces, freeing them to focus on the success of their missions. It provides for future growth through spiral development and possesses an open architecture designed to take full advantage of the rapid evolution of technology.
The MULE/ARV-A(L)'s highly mobile platform is a unique, highly advanced 6x6 independent articulated suspension. Coupled with in-hub motors powering each wheel, the suspension system provides extreme mobility in complex terrain, far exceeding that of vehicles utilizing more conventional suspension systems.
It will climb at least a 1-meter step and provides the vehicle with the mobility performance and surefootedness required to safely follow dismounted troops over rough terrain, through rock and debris fields and over urban rubble. This technology also allows the vehicle to cross 1-meter gaps, traverse side slopes greater than 40 percent, ford water to depths over 0.5 meters and overpass obstacles as high as 0.5 meters, while compensating for varying payload weights and center of gravity locations.
The Transport MULE configuration is designed to support the Future Force soldier by providing the volume and payload capacity to carry the equipment and supplies to support two dismounted Infantry Squads. Multiple tie-down points and removable/foldable side railings will support virtually any payload variation. It is suited to support casualty evacuation needs as well.
The ARV-A(L) version will be armed with a line-of-sight gun and an anti-tank capability. It is designed to provide immediate, heavy firepower to the dismounted soldier.
The Countermine variant is designed to provide detection and neutralization of mines, and marking of cleared lanes through minefields, greatly increasing the safety and mobility of the infantryman...........
http://www.missilesandfirecontrol.com/our_products/groundvehiclesystems/MULE/product-mule.html -
Alright. I have to tell u guys a top secret.
I am currently Developing the brand new, ultra sensitive, UNMANNED INFANTRYMAN! It is part of the BRAND NEW, UNMANNED BATTLEFIELD Project. Human infantry soldiers will no longer be required. Scarecrows piloted by voodoo bomohs will now take over this task. -
no we arent alone. just waved hi to the uAVs flying abv me
-

Good idea to be portable.
fr http://image2.sina.com.cn/jc/2005-05-24/U28P27T1D291092F26DT20050524140539.jpg -

Conceptual image: Robotic surgery is performed to a injured soldier in front line.
fr http://www.sri.com/news/imagebank/#TP Watch the video.Trauma Pod
fr http://www.sri.com/news/
MENLO PARK , Calif.– March 28, 2005. Imagine an automated medical treatment system that does not require onsite medical personnel on the front lines of battle, and is ready to receive, assess, and stabilize wounded soldiers during the critical hours following injury. The Defense Advanced Research Projects Agency (DARPA) Defense Sciences Office (DSO) has taken a significant step toward that goal by awarding an SRI International-led, multi-organization team a $12 million, two-year contract to develop such a revolutionary system.
DARPA has more than 10 projects joint venture with Sg.
2.Team Members
* SRI International, developer of pioneering telesurgery systems
* General Dynamics Robotic Systems, a leader in unmanned ground vehicle systems and developer of the automated pharmacy system
* Oak Ridge National Laboratory, a leader in weapons and material handling robotics
* University of Texas, a research leader in software control systems for material disposal and space manipulators
* University of Washington, a research leader in surgical robotics
* University of Maryland, a research leader in Operating Room of the Future
* Robotic Surgical Tech, Inc., developers of the first robotic nurse systems for the operating room
The team held a kick-off meeting at the “Medicine Meets Virtual Reality” conference in Long Beach, California on January 26-29, 2005.
fr http://www.sri.com/news/releases/03-28-05.htmlThe first phase of the program is an effort to develop robotic technology to perform a totally unmanned surgical procedure within a fixed facility. When fully developed, the Trauma Pod will not require human medical personnel on-site to conduct the surgery, and will be small enough to be carried by a medical ground or air vehicle. A human surgeon will conduct all the required surgical procedures from a remote location using a system of surgical manipulators. The system's actions are then communicated wirelessly to the surgery site. Automated robotic systems will provide necessary support to the surgeon to conduct all phases of the operation.
3.Wait 10 years moreSRI researchers caution that the project remains at least a decade away from appearing on any battlefields. Surgeons will need to manipulate the robot in real time, using technology that prevents any delays between their commands and the robot's actions. The "trauma pod" has to keep connected wirelessly without giving away its position to the enemy, and it has to be nimble and hardy enough to perform under fire.
fr http://abcnews.go.com/Business/wireStory?id=618826 -
http://www.ntu.edu.sg/mae/Research/Programmes/IMR/
NTU has many activities.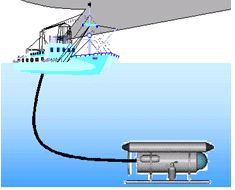
Underwater Robotic Vehicles (URV),NTU
2.Stealth Underwater movement--Biomimic Underwater RobotsModern vessels traveling on or under the water surface use propellers for propulsion and rudders for controlling the direction of travel. The propulsion force is generated due to the pressure difference between the two sides of the rotating propeller. Such kind of propulsion system will generate significant amount of noise, thus makes the vessel lose the stealth and unfriendly to marine ecology and environment. Quite contrarily, marine mammals and microorganisms usually propel in the water through continuous change of the body. Such propulsive principle is developed by creatures naturally and extremely energy efficient. Here we will study the mechanics and control of a class of novel propeller-less biologically inspired underwater autonomous systems both theoretically and experimentally. We have developed prototypes of unmanned underwater autonomous systems based on our findings. Potential applications of our research will benefit marine and coastal engineering, and underwater leisure industry. Currently we are developing three different systems....
Interesting,read the above link.The very stealth sub and ship are coming!?
Amoebot - This is a Metamorphic Underwater Vehicle (MUV) whose locomotion is inspired by the self-propulsion of the microorganism. The microorganism can propel itself in very low Reynolds number flow through the shape change of its body. Similarly, through the change of the body shape, the MUV can swim silently and has the capability to pass regions with obstacles under the water.
RoboGlider - This is an under-actuated underwater deployment robotic platform whose locomotion is inspired by the phenomena of falling leaf or paper. A leaf or paper exhibits complex dynamical behaviors because of the lift and drag in solid-fluid interaction. As the shape parameters of the falling object can be modified, the trajectory of the object in the fluid can be controlled. The RoboGlider thus travels underwater through the change of its critical dimensions, e.g., its length, under the influence of gravity.
Robo-eel - This is hyperredundant underwater robot, or multi-DOF snake like underwater robot inspired by the swimming of eels. The robots use undulatory movement to swim in the water. The objective is to study the locomotion pattern of the robotic eels. The robots are built using a set of water-proof RC servo motor gears, including water-proof RC servo, rechargeable battery boxes, RC transceiver boxes, wiring, etc designed by Prof. Francis Nickols. -
Unmanned Groung Vrehicle
19 May 2005 STimes
NTU intelligent unmanned vehicle is faster and smarter
NTU researchers have developed an intelligent unmanned vehicle which is faster and smarter than current commercial technologies. The unmanned vehicle can move up to four times faster and still find the shortest path between two locations intelligently. This is a project at the Intelligent Systems Centre, jointly set up by NTU and ST Engineering, which was officially opened yesterday. This was the second tie-up between NTU and ST Engineering, after the setup of Laboratory of Advanced and Intelligent Mechatronics in 2000.
fr http://www.ntu.edu.sg/CorpComms/NTU+in+the+News/Apr+-+Jun+05/ -
The military application of Biomimetic robots reflects from the backgrounds of two authors.One from DAPRA and other from Offive of Naval Research.
Neurotechnology for Biomimetic Robots
fr http://mitpress.mit.edu/catalog/item/default.asp?sid=C1F6ACBD-2D8E-4BF6-B642-FCCBB139068A&ttype=2&tid=8812
Edited by Joseph Ayers, Joel L. Davis and Alan Rudolph
The goal of neurotechnology is to confer the performance advantages of animal systems on robotic machines. Biomimetic robots differ from traditional robots in that they are agile, relatively cheap, and able to deal with real-world environments. The engineering of these robots requires a thorough understanding of the biological systems on which they are based, at both the biomechanical and physiological levels.
This book provides an in-depth overview of the field. The areas covered include myomorphic actuators, which mimic muscle action; neuromorphic sensors, which, like animal sensors, represent sensory modalities such as light, pressure, and motion in a labeled-line code; biomimetic controllers, based on the relatively simple control systems of invertebrate animals; and the autonomous behaviors that are based on an animalÂ’s selection of behaviors from a species-specific behavioral "library." The ultimate goal is to develop a truly autonomous robot, one able to navigate and interact with its environment solely on the basis of sensory feedback without prompting from a human operator.
Joseph Ayers is Director of the Marine Science Center and Associate Professor of Biology at Northeastern University.
Joel L. Davis is Program Officer, Cognitive, Neural, and Biomolecular Science and Technology Division, Office of Naval Research.
Alan Rudolph is Program Manager in the Defense Sciences Office at DARPA, the Defense Advanced Research Projects Agency.
2.It is nice we are doing the same thing!!
http://www.neurotechnology.neu.edu/ -
fr http://jczs.sina.com.cn/2005-07-12/1206305194.html
June 30, 2005 NAVAIR
UAV demo flies despite rain
Photo by Jim Jenkins
by Jim Jenkins
NAWCAD PUBLIC AFFAIRS
From as far as Japan, Korea, Australia and Canada, nearly 5,000 people swarmed onto Webster Field Monday to attend the third Unmanned Aerial Vehicle Flight Demonstration.
fr http://www.dcmilitary.com/navy/tester/10_26/local_news/35660-1.html
{kind=link}
{kind=link}